Shaoshu Su
Shaoshu Su
Home
Research
Project
Publications
Contact
CV
Projects
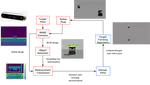
RGB-D Camera Based Target Detection and Active Tracking
In this project, we designed a perception-tracking framework to detected moving target with unknown future motion and then following that target with a TurtleBot robot. We applied the YOLOv3 object detection network to detect the moving target in real-time with an RGB camera in ROS Gazebo Simulation Environment.
Shaoshu Su
,
Boyu Hou
,
Ziying Deng
Robot Trajectory Planning for a Ball-Kicking Game with Real-World TurtleBot
In this project, we need to drive the robot to get to the desired endpoint end and kick the ball (green point) in a gate (bule lines). In the project, we need to design a path to avoid all the obstacles and accurately reach the goal point.
Shaoshu Su
Cite
×