Multi-Robot Fully Distributed Active Joint Localization and Target Tracking
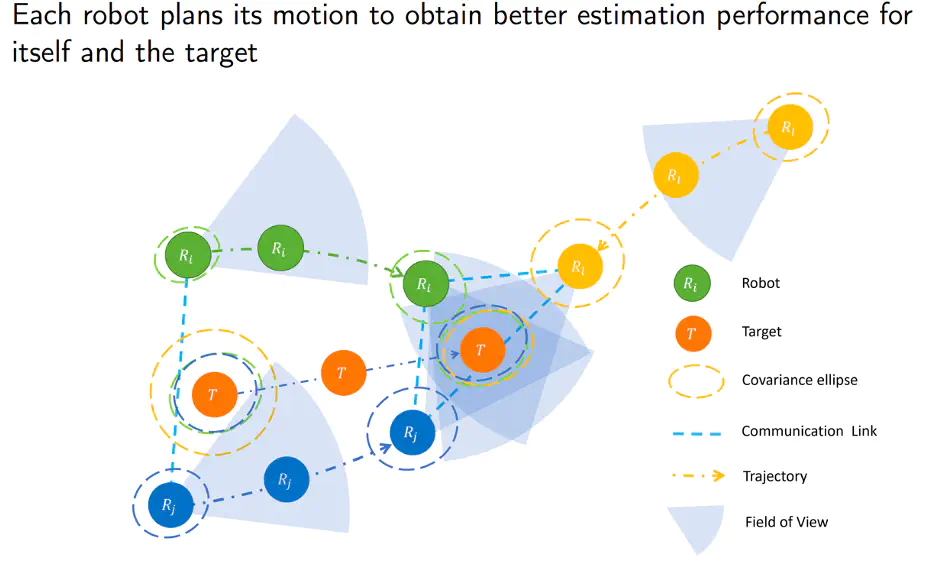
In this paper, we study the problem of multi-robot active joint localization and target tracking (AJLATT), where a team of robots mounted with sensors of limited field of view actively estimate their own and the target’s states cooperatively. Each robot designs its motion strategy to gain better estimation performance while avoiding collisions by using only the information from itself and its one-hop communicating neighbors.
By leveraging the framework of joint localization and target tracking (JLATT) presented in our previous work, we propose two fully distributed algorithms that help each robot design motion strategies to achieve better localization and target tracking performance. These two algorithms are designed from, respectively, the control and optimization perspectives.
The control-based algorithm is designed by incorporating the estimated target’s and robots’ states and their uncertainties as well as collision avoidance in the control policy.
The optimization-based algorithm minimizes an objective function involving both the target’s and robots’ estimation uncertainties and a potential function that helps each robot avoid collision and maintain communication connectivity when the robot is planning its motion.
Monte Carlo simulations demonstrate our algorithms’ feasibility to solve the AJLATT problem, and performance comparison between these two algorithms is given.