Robot Trajectory Planning for a Ball-Kicking Game with Real-World TurtleBot

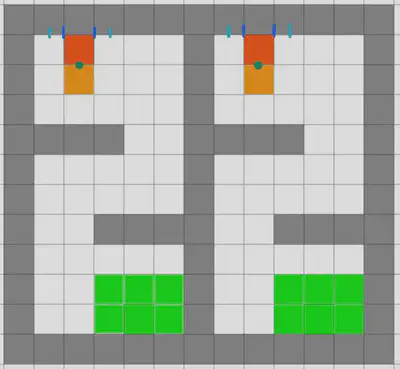
In this project, we need to drive the robot to get to the desired endpoint end and kick the ball (green point) in a gate (bule lines). In the project, we need to design a path to avoid all the obstacles and accurately reach the goal point.
To achieve that goal, we implemented A* algorithm to achieve path planning in a complex environment with obstacles.
We applied polynomial trajectory to smooth the path and apply the PID controller to drive the robot to track the desired trajectory.
The aformentioned methods are validated the feasibility of our algorithm wth real-world TurtleBot Robot.