An Optimization Approach to Fully Distributed Active Joint Localization and Target Tracking in Multi-Robot Systems
Abstract
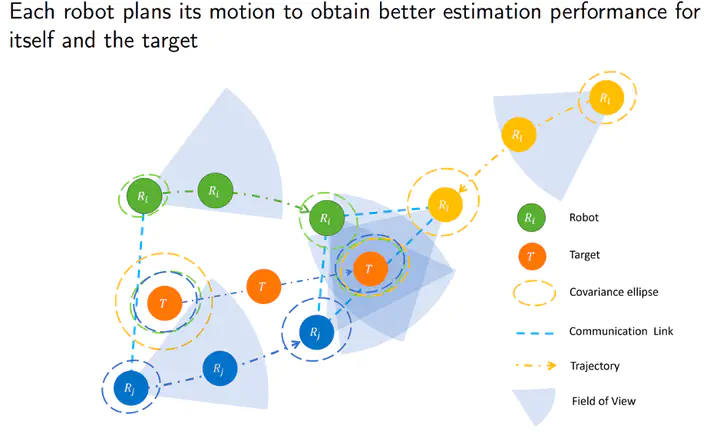
In this paper, the problem of multi-robot active joint localization and target tracking (AJLATT) is studied. Here a team of mobile robots equipped with sensors of limited field of view is driven to actively and cooperatively estimate their own and the target’s states. A motion strategy is designed to drive each robot to achieve better self-localization and target-tracking performance while avoiding collisions. By leveraging our previous work on joint localization and target tracking (JLATT), we propose a fully distributed optimization-based algorithm to solve the problem of AJLATT, where each robot uses only its own and one-hop communicating neighbors’ information. The proposed algorithm aims to minimize an objective function which includes both the target’s and robots’ estimation uncertainties and as well as a potential function which is used for collision avoidance and communication connectivity maintenance. Monte Carlo simulations are performed to demonstrate the effectiveness of our algorithm. As compared to JLATT with random motion, the accuracy of both localization and target tracking is improved.